ROV and hoisting arrangement simulations for productive and reliable deep-sea dredging
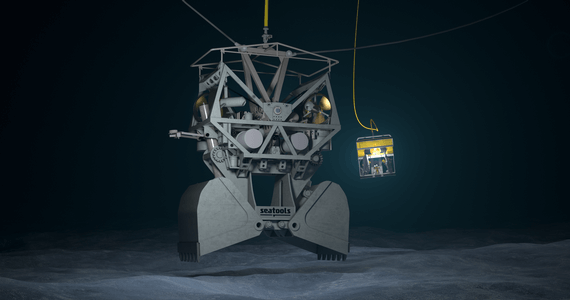
A new deep-sea dredging method was required to excavate in challenging soil conditions at a water depth of 150 meters. To this purpose, the Grab Excavation System (GES) was developed.
Seatools designed and built the grab positioning ROV and its control system, including full 3D-motion compensation. In addition, Seatools performed simulations on the hoisting arrangement and integrated algorithms to prevent grab toppling during seabed interaction.
Continue to the in-detail project page or to the Advanced simulations and control engineering solution page