Highly productive deep-sea dredging thanks to ROV grab delivering excellent positioning performance
Boskalis and Tideway required a new deep-water dredging method to excavate in challenging soil conditions at a water depth of 150 meters. To this purpose, the Grab Excavation System (GES) was developed.
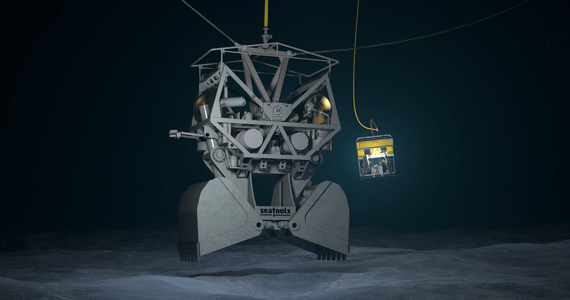
Seatools designed and built a highly automated grab positioning ROV as well as the related control system for the hoisting arrangement. The high level of ROV automation, combined with extremely high positioning accuracy (20 cm), resulted in outstanding dredging production rates.
Continue to the in-detail project page or the AUVs and ROVs solution page